Yunanca kökenli olan bu kelime günümüzde otomobil dünyasında sıklıkla kullanılan bir terim halini almıştır. Otonom nedir sorusunun cevabını basitçe bu şekilde verdikten sonra dilerseniz şimdi otonom araç ve sürüş teknolojileri hakkında biraz daha geniş bilgiler verelim.
Otonom araç nedir, otonom sürüş nedir gibi soruların cevabı verilirken mükemmel bir teknolojinin varlığından söz edilebilir. Motorlu bir aracın tüm kararları kendisi verecek şekilde trafiğe çıkması, bir yerden başka bir yere gitmesi, bu sürede yol boyunca binlerce belki de milyonlarca ihtimali değerlendirerek hedefine ulaşması çok da hafife alınacak bir başarı değildir.
Otonom araçlar nedir, otonom teknoloji nedir sorularının cevapları da benzer şekilde ileri teknoloji çözümleri olarak karşımıza çıkar. Otonom araçlar şimdilik yollarda az sayıda örnekle temsil ediliyor olsa da yakın gelecekte özellikle ticari boyutta çok daha yaygın bir şekilde kullanılacağı öngörülmektedir. Diğer markalarda olduğu gibi Volkswagen binek araç modelleri konusunda da otonom araç çalışmaları bulunmaktadır.

Günümüzde emekleme döneminde olduğu kabul edilen otonom araç teknolojileri aslında oldukça eski fikirlerden ortaya çıkmıştır. 1900’lü yılların ortalarına doğru ilerleyen otomobil endüstrisinde ortaya konulan bazı çalışmalar otonom araç ile ilgili ilk tohumların atılmasını sağlamıştır. Örneğin General Motors imzalı Freebird II, şerit takip edebilme özelliğine sahip ilk araç olarak kayıtlara geçmiştir.
Sonraki yıllarda otonom araç teknolojisi kadar bunların yola entegrasyonunun da önemli olduğu sonucuna varılarak otoyollar ile etkileşim üzerinde durulmuştur. Bu çerçevede özellikle Japon ve Alman tasarımcılar bilgisayar ve kamera sistemlerini entegre ederek araç hızlarını önemli ölçüde arttırmayı başarmıştır.
Otonom araçlar ve sürüş teknolojileri aynı anda çok sayıda teknolojik yapının eşgüdüm içerisinde faaliyet göstermesi sonucunda çalışır hale gelebilir. Aslında bu durumu hiç kimsenin hata yapma şansının olmadığı bir takım oyunu olarak nitelemek mümkündür. Son derece gelişmiş donanım ve yazılım teknolojileri ile yüksek hassasiyet düzeyindeki sensörler dış ortamdaki verileri elde ederek değerlendirir. Böylece anlık olarak elde edilen verilerin işlenmesi sonucunda araç sorunsuz hareket kabiliyeti kazanır.
Otonom araçların temel bileşenleri arasında bulunan yüksek teknoloji ürünü yapılar arasında
Bu unsurlardan LiDAR sistemi lazer destekli olarak yakın çevrenin 3 boyutlu haritasını çıkarma konusundaki maharetleri ile öne çıkar. Otonom bir aracın olmazsa olmazı konumundaki sistem modellediği harita üzerinde aracın konumunu hassas bir şekilde takip etme yeteneğine sahiptir.
Otonom araba sınıflandırması için üzerinde ittifak kurulan yaklaşımda temelde 6 segmentten söz edilmektedir. 0’dan başlayan ve 5. seviyede nihai noktaya erişen sınıflandırma sistemi adım adım ilerlemenin sembolü olarak tanımlanabilir.

Sürücüsüz yani otonom araçların oldukça karmaşık çalışma düzenine sahip olduğunu söylemek mümkündür. Çok sayıda sensör, kamera ve algılayıcı sistemler ile çevreye ait veriler toplanır ve aracın kendi konumu ile bu veriler bir arada değerlendirilir. Otonom araç elde ettiği veriler ışığında kendi konumunu doğru belirlemek ve hareketli/hareketsiz diğer unsurlara göre olan konumuna uygun hareket etmek zorundadır.
Güvenli sürüşün garanti altına alınabilmesi için bu konularda sıfır hata ile işlemlerin yapılması gerekir. Bulunduğu konum kadar o konumdaki pozisyonuna uygun olarak trafik kurallarını değerlendirmek, diğer unsurlar ile interaktif etkileşim içerisinde yoluna devam edebilmek sanıldığından çok daha zordur. Bu noktada LiDAR adı verilen sistem otonom aracın işlerini kolaylaştırır. Lazer destekli olarak çevresindeki verileri toplayan sistem oluşturduğu 3D haritalara bu bilgileri işler ve kendi konumunu hassas bir şekilde bu veriye adapte eder.
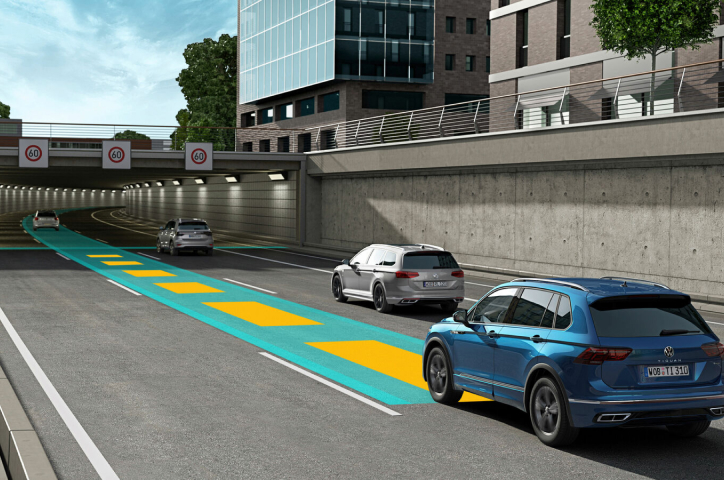
Durağan faktörlerden daha fazla etkileşim içinde olunan hareketli faktörler otonom sürüşün en hassas noktasıdır. Radar sistemleri sayesinde çevresindeki hareketleri algılayan otonom araç, yola aniden çıkan insan veya kavşaktan hızla yola dönen bir araç için mesafe ve hızları doğru algılar ve ona göre davranış geliştirir.
Kamera ve sensörler de her biri benzer şekilde fonksiyon üstlenen son derece önemli bileşenlerdir. Kameralar aracılığıyla trafik ışıkları, tabelalar, hız sınırlamaları gibi LiDAR tarafından üretilemeyen veya işlenemeyen bilgiler değerlendirilebilir. Sensörler de GPS takibi, hız ölçümü gibi alanlarda önemli roller üstlenir.
Bu şekilde oldukça karmaşık ancak üst düzey bir düzen içerisinde geliştirilen araçların otonom bakım koşullarında hizmet verebilmesi gerekir. Otonom araçlar da konvansiyonel benzerleri gibi düzenli olarak periyodik bakım hizmeti almak durumundadır. Aksi halde beklenen hassasiyet içerisinde çalışması mümkün olmaz.

 Volkswagen Binek Araç
Volkswagen Binek Araç
 Volkswagen Ticari Araç
Volkswagen Ticari Araç